
 安卓版下载
安卓版下载
大小:46.83MB
下载:12884次
倒数日安卓版
- 支 持:Android
- 分 类:热门软件
- 大 小:46.83MB
- 版 本:
- 评 分:
- 开发者:
- 下载量:12884次
- 发 布:2024-10-26 06:12
手机扫码免费下载
#倒数日安卓版截图



#倒数日安卓版简介
深入解析H∞鲁棒控制:原理、应用与设计方法
在自动化和控制系统领域,鲁棒控制是一种重要的控制策略,它能够使系统在面临外部扰动和内部参数变化时保持稳定性和性能。H∞鲁棒控制作为一种先进的控制方法,因其强大的鲁棒性和实用性而受到广泛关注。本文将深入探讨H∞鲁棒控制的基本原理、应用场景以及设计方法。
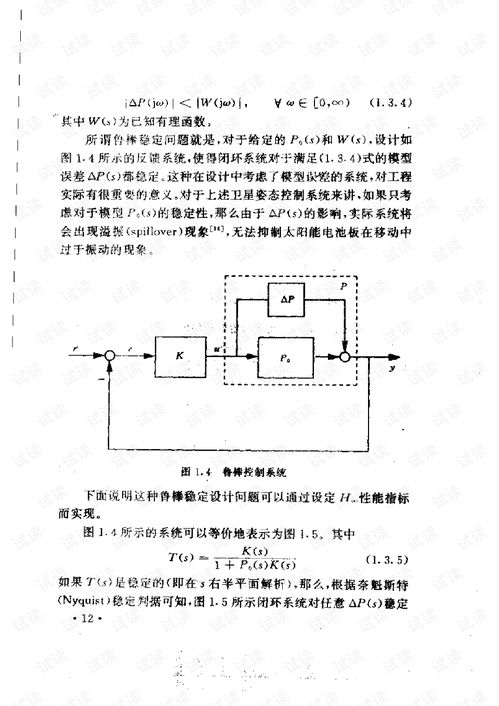
H∞鲁棒控制的核心思想是设计一个控制器,使得闭环系统的性能在所有可能的系统不确定性下都能保持最优。这里的“H∞”指的是系统不确定性的度量,即系统扰动传递函数的无穷范数。无穷范数越小,系统的鲁棒性越强。
飞行控制系统:在飞行器设计中,H∞鲁棒控制可以有效地抑制飞行过程中的各种扰动,提高飞行稳定性。
汽车控制系统:在汽车主动悬架系统中,H∞鲁棒控制可以优化车辆的行驶性能,减少颠簸。
机器人控制系统:在机器人运动控制中,H∞鲁棒控制可以确保机器人在面对不确定性和干扰时保持稳定。
H∞鲁棒控制器的设计方法主要包括以下几种:
状态反馈H控制是H∞鲁棒控制中最常用的方法之一。它通过设计一个状态反馈矩阵K,使得闭环系统的性能在所有可能的系统不确定性下都能保持最优。状态反馈H控制的设计通常需要求解线性矩阵不等式(LMI)。
输出反馈H控制适用于那些状态变量难以获取的系统。它通过设计一个输出反馈矩阵K,使得闭环系统的性能在所有可能的系统不确定性下都能保持最优。输出反馈H控制的设计同样需要求解LMI。
混合灵敏度H控制是一种结合了状态反馈和输出反馈的H∞鲁棒控制方法。它通过设计一个混合灵敏度矩阵K,使得闭环系统的性能在所有可能的系统不确定性下都能保持最优。混合灵敏度H控制的设计同样需要求解LMI。
Matlab:Matlab是一款功能强大的数学计算软件,它提供了丰富的工具箱,可以方便地进行H∞鲁棒控制器的设计。
Simulink:Simulink是Matlab的一个模块,它允许用户通过图形化的方式构建和仿真控制系统。
Control System Toolbox:Control System Toolbox是Matlab的一个工具箱,它提供了用于控制系统分析和设计的各种函数和工具。
H∞鲁棒控制是一种强大的控制策略,它能够使系统在面临不确定性和干扰时保持稳定性和性能。本文介绍了H∞鲁棒控制的基本原理、应用场景以及设计方法,并简要介绍了相关的工具和软件。希望本文能够帮助读者更好地理解和应用H∞鲁棒控制。







